无人机传感器
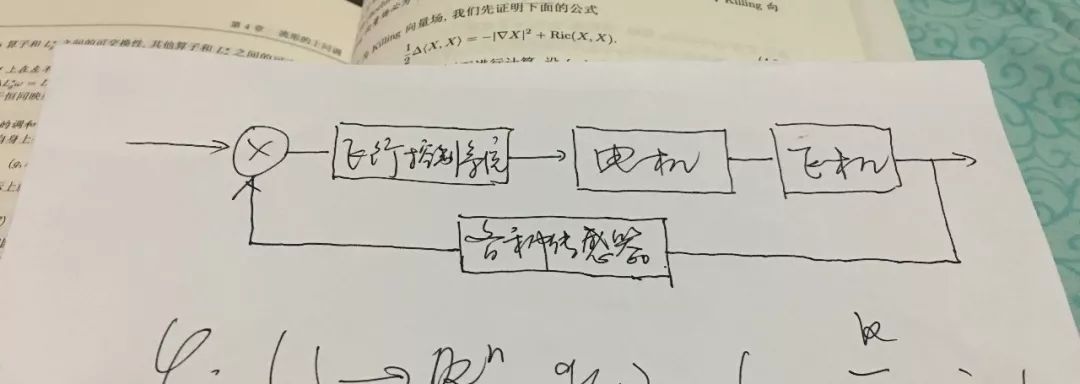
传感器是感知飞行姿态,识别物体、距离和温度等的仪器。它的作用主要是协同配合飞控工作。飞控接收来自遥控器的信号后,将信息与传感器感知的飞行姿态、温度、距离等数据进行对比判断。然后控制电调输出,进而调整电机的转速。控制飞机的飞行姿态、速度和稳定。飞控要完成控制任务离不开传感器和检测反馈信息
无人机需要传感器来确定空中的姿态,采用的传感器多为惯性传感器。惯性传感器通过测量飞行器加速度和角度获取飞行器瞬时速度、瞬时姿态和瞬时位置。但使用惯性传感器需要解决的问题是长时间的精度问题,随着时间的增长,会有误差累计,漂移等(这是为什么每一次开机起飞前都需要IMU初始化的原因),从而使飞行器状态变化,最终失去控制。解决的办法是采用加速度传感器,它可提供额外的参数来抵消陀螺仪参数计算的误差,从而确保飞机保持更好、更稳定的飞行状态。
涉及到的传感器有:陀螺仪、加速度计、磁力计、气压计、超声波传感器、全球定位系统、红外传感器、电子罗盘和激光扫描测距雷达。
今天只说陀螺仪,其余的部分分两次说完。
1、陀螺仪
陀螺仪利用一个高速旋转的物体所指的方向在不外力的影响下不改变的原理,来获取系统的转动角度。它具有稳定性和进动性,转动时如果受到外力的作用,陀螺会在自转的同时沿另一个固定轴不停旋转。主要利用角度量守恒的原理,因此它主要是一个不停转动的物体,它的转轴指向不随承载它的支架的旋转而改变。
另一种更先进的陀螺仪是MEMS陀螺仪,它利用旋转物体在有径向运动时所受到的切向力。MEMS陀螺仪依赖于相互正交的振动和转动引起的交变科里奥利力,振动物体被柔软的弹性结构悬挂在基底之上。整体动力学系统是二维弹性阻尼系统,在这个系统中振动和转动诱因的科里奥利力把正比于角速度的能量转移到传感模式。通过改进设计和静电调试使得驱动和传感器的共振频率一致,以实现最大可能的能量转移,从而得到最高的灵敏度。
还有7种传感器,后面两次来说吧,哈哈哈。
下一篇:霍尔式曲轴位置传感器介绍
