咖咖课堂秋季班第五课:光线传感器的运用
一、光线传感器介绍
mBot上的板载光线传感器是用光敏电阻制作的。光敏电阻是一种半导体,当受到光线照射时的能量刺激,会产生更多的自由电子,导电特性发生变化,从而电阻值也会随之变化。光线传感器正是利用这种特性来感测环境光线强度。
mBot板载光线传感器位于控制板前部。

二、光线传感器命令
1. 获取传感器读数命令

功能是读取光线传感器的数值,数值取值范围0~1024。【板载】选项指的是传感器的位置是位于控制板上而不是外接的。
2. 熊猫说出光线传感器读数
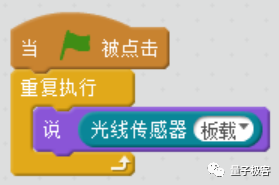
下面我们做一个利用角色区里的熊猫先生说出光线传感器读数的程序,我们需要用到【外观】里的【说......】指令

功能是:让角色旁出现一个对话框,显示指令窗格内的文字。
下面连接好mBot,拖出以下程序,点击绿旗,先观察熊猫说出的数值,然后用手遮住光线传感器,看看数值会不会变小呢?
3. 创建自定义变量
变量的功能是用来存储会发生变化的数值。我们可以设置变量存储的数值,也可以随时读取这个数值。
想要在mblock中创建自己的变量,需要用到【数据和指令】里的【新建变量】。
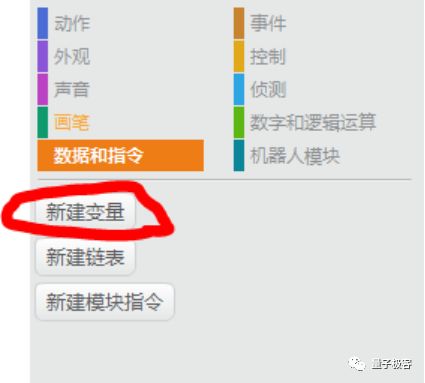
会出现如下的小窗口【新建变量】,输入你想设定的变量名称,命名规则与新建模块指令时相同。

这个变量默认值为适用于所有角色,每个角色都能够使用该变量存储的数值。
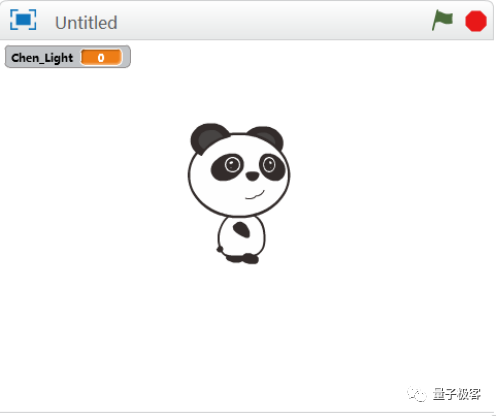
接着单击【确认】键。指令区会出现一些变量相关的指令

其中【将变量Chen_Light的值设为0】就是设定变量内容的指令。
连接mBot,电机绿旗,尝试以下程序,光线传感器的值是否被放入左上角的变量中了呢?
同样用手遮住mBot的光线传感器,看看数值是否会减小。

4. 如果。。。那么。。。否则。。。
下面我们再介绍一个新的命令:
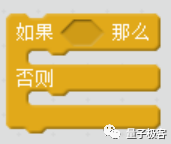
功能是,依照六角形的条件进行判别,符合条件则执行【那么】程序串,如果不符合条件,则执行【否则】程序串。
【如果。。。那么。。。否则。。。】指令需要条件才能进行判别,这个条件放在【如果。。。那么。。。】中间的六角形空格里。空格里需要放入逻辑运算指令。即【数字与逻辑运算】和机器人模块里的六角形命令

六角形命令的功能是判断命令是否符合条件,符合输出【是】,不符合输出【否】
例如

命令的功能是,左边方框里的值大于右边方框则输出【是】,否则输出【否】
5. 熊猫变大变小
利用上面介绍的命令,我们可以做一个控制角色熊猫变大变小的程序

这里面【外观】里的【将角色的大小增加。。。】

功能是,放大或者缩小角色的图形指定数值的百分比。正数代表放大,负数代表缩小。默认值是100,表示100%(角色原始大小)

上一篇:智能传感器系统功能
