咖咖课堂mbot第十课 超声传感器的使用
同学们,今天我们学习超声传感器的使用方法。超声传感器就是mBot上正前方像“大眼睛”一样的东西。
一、超声传感器简介
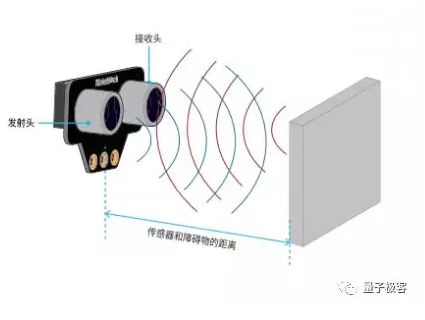
超声传感器是一种测量距离的传感器。它的工作原理和蝙蝠一样,是通过超声回声定位来实现距离探测的。

超声传感器的两个“眼睛”其中一个负责向前发射超声波,另一个负责检测遇到障碍物后反射回来的超声波,通过计算反射波返回的历时,就可以判断障碍物的距离了,需要注意超声传感器的测量范围是3cm到400cm。
二、命令
1. 获取超声传感器读数
在mblock中用来获得超声波传感器读数的命令是:

功能是:获取超声传感器的读数
2. 熊猫说读数
下面,我们还是先来一个让熊猫说出巡线传感器读数的小程序:
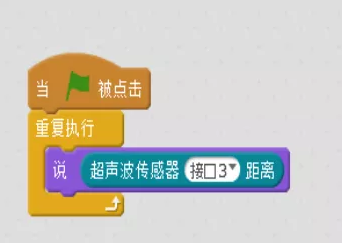
通过上面这个程序,同学们可以仔细观察,把手放在超声传感器前方移动,传感器读数会不会发生变化。
3. 简单避障
下面我们在利用之前学过的知识来完成一个简单避障程序

同样的道理,请使用脱机模式哦,同学们试试看mBot遇到障碍物后会有什么样的反应?
4. 随机数
之前的程序mBot一遇到障碍物就会右转,那么有什么办法能让mBot自己随机决定该向哪个方向转弯呢?
下面我们引入随机数:

功能是:在1到10之间随机去一个数值(区间边界1、10可以通过键盘输入或者变量来修改)
5. 随机避障
下面我们就来实现随机避障

上传程序,看看mBot是不是随机转弯了呢?
咖咖课堂 作业
小创客们,今天的课程你们学会了吗?请同学们结合上一节课学习的悬崖检测和这节课学习的超声避障做一个防跌加避障程序,当然在完成防跌加避障要求的基础上也可以加入自己的创意元素哦,做好后拍成视频(不要超过15秒)上传到微信群就可以啦!!

上一篇:水浸传感器的作用
下一篇:玉柴德尔福共轨故障代码对照查询表