机器人外传感器-视觉传感器
1.生物视觉传感器与其功能
1)生物视觉的进化
动物的眼睛多种多样,最原始的是单细胞生物眼虫,它在鞭毛的前部有感光器官。生物只是在进化成多细胞生物后才出现形状上像眼睛的视觉器官。例如,涡虫就具有一对与原始单孔照相机似的眼睛[1]。
在人类等脊椎动物以及墨鱼、章鱼等的眼睛里有透镜,不过它是经历了相当久远的进化过程才形成的。透镜出现后,有了聚光的效率及聚焦的功能,可以获得更清晰的图像。
另外,昆虫和蛇都具有复眼,它的结构将在后面进行说明,这些动物通过复眼扩大视野,得到二维图像。随着进化过程的演进,生物视觉传感器的构造变得相当复杂。
2)人类的视觉传感器
人类眼球的构造如图1.30所示[2],整个眼球的直径约24mm,外来光线通过角膜一眼房水一瞳孔一晶状体一玻璃状体到达视网膜,在视网膜上成像。像人类这样栖息在陆地上的脊椎动物,光从空气中进人角膜时,会产生大的折射,因此需要靠晶状体来调整光线的折射,以便正确地聚焦成像。
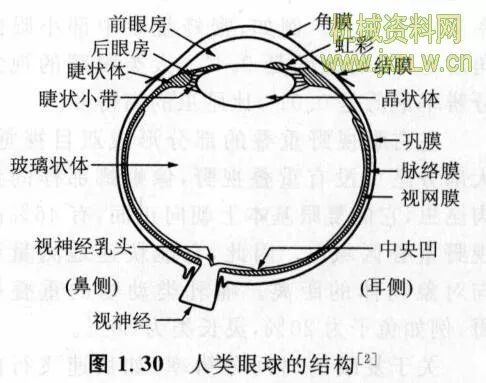
改变瞳孔的大小可以调节人射光量,瞳孔的最小尺寸(缩瞳)为直径lmm,最大(散瞳)为约smm,即对光的调节能力只有64倍。外界光量的变化范围为100万倍左右,所以只靠瞳孔不足以调节光量,还需要借助于视觉细胞适应明暗的变化。
在视网膜中有锥体(cone)和杆体(rod)两种类型的视觉细胞(光接受器),在这里光被变换为电信号,它们经过某种类型的细胞后,再通过视网膜的输出细胞,即神经细胞最终被送至大脑[3]。锥体能在光线明亮的地方进行颜色分辨和形态视觉处理,相反,杆体则担负着在光线昏暗的地方观察明暗的任务。锥体的数目约为700万个,集中于视网膜中心。杆体则相反,大都分布在视网膜的周边。
3)昆虫视觉传感器
昆虫的视觉大约在7亿年前与脊椎动物的分离,后来其独自继续进化。与人类眼睛相同的是,昆虫的视觉也是它们为了适应生存环境而进行最优化的结果。昆虫的主要视觉(复眼)构造如图1.31所示[4]。
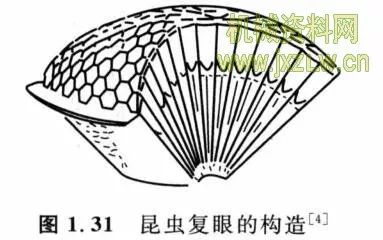
复眼由若干个小眼集合而成。例如,幼蝶的复眼有16000个小眼,蜜蜂有5000个小眼,而苍蝇也有800多个小眼。
在复眼中,小眼彼此之间的角度是决定其空间分辨率的主要因素。小眼之间的角度随复眼部位的不同而各异,复眼中部小(分辨率高),周围大。例如,蜜蜂复眼中部小眼的角度是1°,幼蝇的是0.4°。人类眼睛的视觉分辨率最低是0.01°,比昆虫的高得多。
左右眼视野重叠的部分形成双目视觉。大部分昆虫没有重叠视野,像蝗螂那样的食肉昆虫,它的复眼基本上朝向正面,有46%的视野重叠区域[4]。因此,它能快速地测量到与对象物体的距离。哺乳类动物的重叠视野,例如兔子为20%,灵长类为80%。
关于复眼的时间分辨率,如快速飞行的蜜蜂为200~300Hz,蜻蜓为170Hz,苍蝇为14OHz,缓慢行走的独角蟹为30Hz,蚂蚁低于40Hz,而人类眼睛则是30~40Hz,因此人眼的时间分辨率与低速昆虫的时间分辨率基本相同。
至于色觉,人类的可视波长为400~800nm,昆虫的如蜜蜂的为300~650nm,因此它能感受到紫外线。
4)视觉信息的处理
自古以来,人类就一直探索着视网膜接受光线图式的信息处理机理。这项研究涉及对生物体脑部活动的监控技术,经常采用的方法有:对猴子等高级动物施加光刺激,取出脑部的电信号,研究信号与光刺激之间的关系。
视网膜的输出是通过外侧膝状体被传递到后头叶的视野中。现在人们已经掌握在视野中除了进行方位、波长、运动方向、两眼视差等的基本计算之外,还存在一些区域能实现与动态形状、色彩等相关的形状分析和动作分析[3,5,6〕。
目前有关高级视觉的研究还不够充分.虽然对大脑的功能定域性已经有了基本的认识,但是在神经即脑细胞水平这一级上尚无对定域性得出的结论。据报道,在猴子的实验中已证实存在着对手产生反应或对脸部产生反应的神经。
最近,由于PET(阳离子放射断层摄影装置)被开发出来,使人们对生物体脑部活动的研究有了可能[7].因此,未来人类对视觉信息处理机理的了解会更进一步深人。
2.光接收装里及各种摄像机
1)光电二极管与光电转换器件
图1.32(a)是pn型光电二极管(photo di-ode)的结构.如果让光子射人半导体的pn结边界耗尽层,就会激励起新的空穴。利用电场将空穴和电子分离到两侧,就可以得到与光子量成比例的反向电流。pn型元件的优点是暗电流小,所以被广泛用于照度计、分光度计等测量装置中。

在高速响应的发光二极管中有pin结型与雪崩型[8]。前者是在pn结边界插人一个本征半导体i层取代其耗尽层。给它施加反向偏压,可以减少结电容,获得高速响应;而后者是在pn结上加100V左右的反向偏置电压产生强电场,能激励载流子加速,与原子相撞产生电子雪崩现象。这些高速型二极管的响应很快,能用于高速光通信等。
光电晶体管(photo transistor)就是经过晶体管把光电二极管的输出放大的结构。
2)PSD
PSD(Position Sensitive Deteetor,位置敏感探测器)是测定人射光位置的传感器,由发光二极管、表面电阻膜、电极组成[9]。人射光产生的光电流通过电阻膜到达元件两端的电极,流人各个电极的电流与电阻值存在对应关系,而电阻值又与光的人射位置以及到各个电极的距离成比例,因此根据电流值就能检测光人射的位置。PSD元件中有一维和二维两种,它们都具有高速性,但是要注意人射到开口部分的散射光的影响。
3)CCD图像传感器
电荷藕合器件(CCD:Charge Coupled De-vice)图像传感器是由多个光电二极管传送储存电荷的装置。它有多个MOS(Metal OxideSemi。ondu。to:金属一氧化物一半导体)结构的电极,电荷传送的方式是通过向其中一个电极上施加与众不同的电压,产生所谓的势阱,并顺序变更势阱来实现的。根据传送电荷需要的脉冲信号的个数,施加电压的方法有二相方式和三相方式。
CCD图像传感器有一维形式的,是将发光二极管和电荷传送部分一维排列制成的。此外还有二维形式的,它可以代替传统的硒化福光导摄像管和氧化铅光电摄像管二维传感器。二维传感器属于水平和垂直传递电荷的传感器,传送方式有行间传送(interhnetransfer)、帧一行间传送(frame interline trans-fer)、帧传送(frame transfer)及全帧传送(fullframe transfer)四种方式。
图1.33所示为行间传送的方式,采取一维摄像区域(接收部分)与传送区域平行布置结构的方法。接收部分多使用二极管。每一帧曝光所储蓄的电荷分别被垂直或水平地传送,然后以图像信号的形式被取出。在CCD内部电荷传送的效率非常高,因此其具有高的灵敏度。由于整个传送区域是被遮光的,所以在传送中不会被曝光。
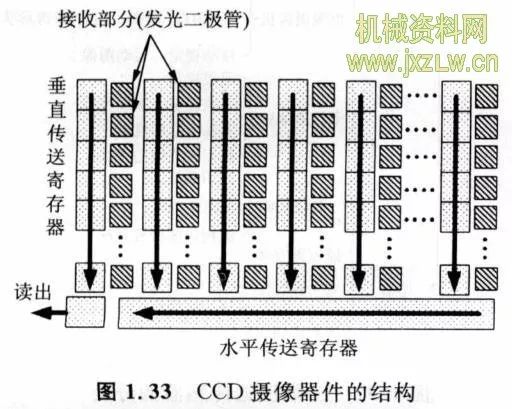
CCD图像传感器把垂直寄存器用作单画面图像的缓存,所以可以将曝光时间和信号传送时间分离开。也就是说,其具有所有像素能在同一时间内曝光的特点。
4)CMOS图像传感器
CMOS图像传感器[10]是由接收部分(二极管)和放大部分组成的一个个单元,然后按照二维排列。由于放大器单元之间特性的分散性大,以致其噪声比较大。不过,近年来噪声消除电路的性能已得到改善,故使CMOS图像传感器得到迅速普及和应用。
CMOS传感器的优点是耗电低,并且利用一般的半导体制造技术就可以完成CM()S处理器的设计和加工,这都有利于图像处理电路和图像传感器的单片化和低成本化[11][12]。
5)其他的摄像元件
光电子增倍管就是根据二次放电效应增大人射光的元件,因此它可以用来检测微弱光线,如用于夜间监视摄像机等。此外,它还可以用于分析仪器或X射线照相等场合。
在红外线[13]图像方面有波长为2~15um的中红外和远红外区域的传感器,在红外线检测器中得到较多使用的是HgCdTe和AI-GaAs结晶的量子型传感器.热效应型传感器最近也被实用化了,它的原理是把装置接收的人射红外线变换为热能,再利用温度检测器将温度升高转变为电信号输出.热效应型图像传感器无须冷却器,这是量子型图像传感器所不及的优点。
3.功能性视觉传感器
1)人工视网膜传感器
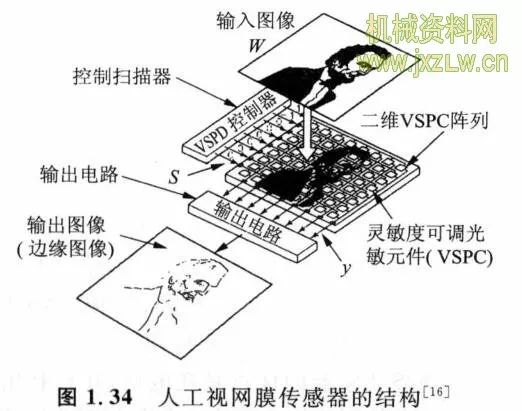
模仿人类的视网膜信息处理功能的图像传感器如图1.34所示,这种人工视网膜芯片[14,15]已经付诸使用。人工视网膜芯片是由像素阵列、控制扫描器、输出电路组成。各个像素根据给定的-1、0、+1三种灵敏度状态控制信号受控,各自对应负、零、正灵敏度,属于灵敏度可调光敏元件(VSPC:Variable Sen-sitivity Photodeteetion Cell)。因此,可以利用适当的控制规则,实现边缘增强、光滑、模式匹配、一维摄影等图像处理运算。
与CCD相比,人工视网膜传感器不仅图形处理功能强,而且具有灵活、快速、耗电低、成本低等特点,因此它被广泛应用于游戏机、数字摄像机及安全等领域[16,17]。
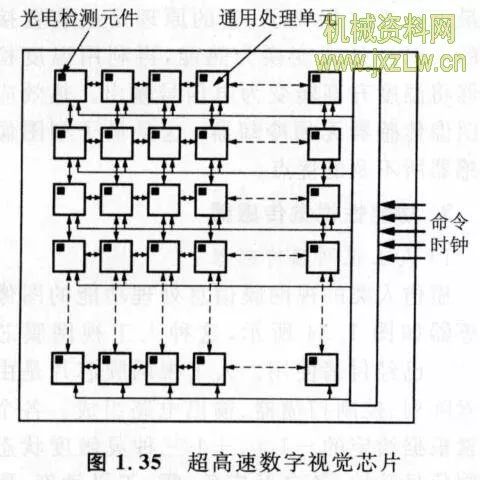
2)超高速数字视觉芯片
人们正在研究包含图像处理功能在内的超高速数字视觉芯片[18,19],它已经超出以往以处理摄像信号为主的传统图像处理的界限。在图1.35中,在二维平面内排列的光电检测元件阵列的信息被送人制作在同一芯片上的并联通用处理单元(PE)内,由于是实施完全并行的处理,因而不受摄像信号速率的限制,能完成高速处理。目前,人们正在试制64×64像素的芯片,它能在lms的帧速率内同时跟踪18个物体的轨迹[20]。
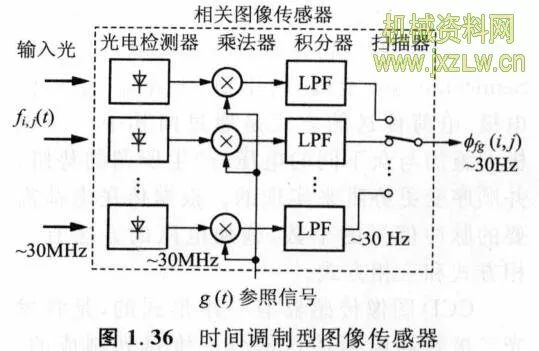
3)时间调制图像传感器[21 .22]
这种图像传感器的每一个像素都把光检测器生成的人射光量,以及它与全体像素共同参照信号的时间相关值并行储存起来,然后类似于图像传感器那样输出。如果设像素(i,j)的光检测器的输出是fij(t),外部电信号为g(t),扫描周期一致的积分时间为T,那么时间相关型图像传感器的输出为

图1.36示出了时间调制型图像传感器的结构示意。由于将高带宽的光检测器与乘法器结合,故f(t)和g(t)不受扫描周期的限制。在进行调制后,各个像素生成带宽很窄的信号,故可以按照低的扫描周期输出。
时间调制型图像传感器的应用主要在振动模态测量、图像特征提取、立体测量、可变分光谱摄像等方面[22]。例如,放置在环境光中的物体在高频调制光的照射下,将调制光线进行适当的时间延迟后作为参考信号,就能消除环境光的影响,拍摄出仅由调制光照明的物体图像。
4.三维视觉传感器
1)三维视觉传感器的分类
三维视觉传感器的分类如图1.37所示。它可以分为被动传感器(用摄像机等对目标物体进行摄影,获得图像信号)和主动传感器(借助于传感器向目标物体投射光图像,再接收返回信号,测量距离)两大类。

2)被动视觉传感器
(1)单眼视觉采用单个摄像机的被动视觉传感器有两种方法:一种方法是测量视野内各点在透镜聚焦的位置,以推算出透镜和物体之间的距离;另一种方法是移动摄像机,拍摄到对象物体的多个图像,求出各个点的移动量再设法复原形状。
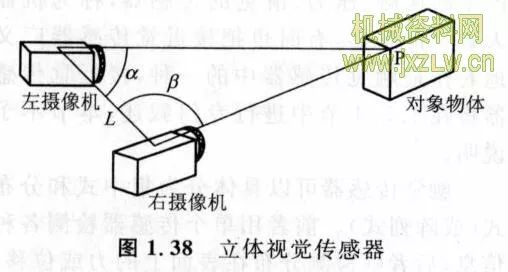
(2)立体视觉双眼立体视觉卿〕是被动视觉传感器中最常用的方式。在图1.38中,左右两个摄像机给物体拍照,然后对任意点P在图像上的位置做图像处理,得到aβ。如果此时已知两个摄像机的相对关系(L),就可以计算出P的三维位置(三角测量原理)。增大摄像机之间的间隔,能提高纵深测量精度,不过这是以减少两个摄像机的公共视野为代价的。可见这种方法随观察角度的不同,有时适应性会较差。于是,有人提出利用三个摄像机的三眼视觉[24]和由不同基线长度的多个摄像机组合成的多基线立体视觉[25]方法。
3)主动视觉传感器
(1)光切断法光切断法的原理如图1.39所示。光切断法即把双眼立体视觉中的一个摄像机改变为狭缝投光光源的方法。然后从水平扫描狭缝光得到的镜面角度,以及图像提取的狭缝像的位置关系,按照与立体视觉相同的三角测量原理就可以计算和测量出视野内各个点的距离。

(2)空间编码测距仪在光切断法中要想获得整个画面的距离分布信息,必须取得多幅狭缝图像,这样做相当花费时间。要解决这个问题,可以将其改为多个狭缝光线同时投光的办法,不过此时需要对图像中的多个狭缝图像加以识别。也就是说,可以给各个狭缝编排适当的代码ID,作为ID的编排方法有把多条狭缝光线随机切断后再投光的方法[26],以及利用颜色信息识别多个狭缝的方法[27]。

已经实现实用化的空间编码测距仪[28,29],它的原理是给狭缝图像附加有效ID。如图1.40所示,利用掩膜片依次向对象物体投射多个编码图案光束,而编码的特点是让各个像素值按照一定的规律成时间序列变化。例如,在图1.40中,以[001]编码的区域的位置是3。在已知几何位置的投影仪中,空间编码与各个狭缝像的投射角度是一一对应的,所以根据三角测量法就可以计算出到物体的距离.对于编码图案来说,采用相邻编码之间的代码间距为1的交替二进制符号,这样可以使符号边导致的误差最小。另外一个措施是在每个编码投射黑白交替的相补图形,这样取得的图像差分值就可以用来减少对象物体表面反射率和光散射的影响。图案投光的装置采用电灯和液晶闪光灯[28]组合,或者激光和多角形镜面的组合[29]。
在基于三角测量原理的主动测距仪中还有几种其他方式,如同时投射多个点光源[30,31]的方式和投射多个正弦图案的方式[32]。
(3)莫尔条纹法莫尔条纹法(Moirefringe)就是投射多个狭缝形成的条纹,然后在另一个位置上透过同样形状的条纹进行观察,通过对条纹间隔或图像中条纹的倾斜等进行分析,可以复原物体表面的凹凸形状[33一35]。
(4)激光测距法它是一种投射激光等的高定向性光线,然后通过接收返回光线.测量距离的方式[36]。其中,有计算从光线发送到返回的飞行时间的方法[37〕和投射调制光线通过测量接收光线的相位偏差来推算距离的方法[38]等。
4)主动与被动传感器混用
从原理上讲,被动传感器属于立体视觉,但是,如果是为了提高立体视觉的可靠性,将特征条纹作为光图案投射到物体上,这种方式就应该归属于主动传感器与被动传感器混用的类型,该系统由立体摄像机和图案投光器构成.投光图案包括随机点结构、条状花、各种大小的点图案、随机间隔.缝隙光等。
混合方式无需改变投光图案,仅由立体摄像机和简单的投影器即可组成系统,因此作为工业机器人及移动机器人的视觉已经达到实用化。
上一篇:称重传感器的专业的术语有哪些?
下一篇:高铁大健康系统超声波传感器应用
